激光雷达将会是高级自动驾驶的必备传感器!
传感器是汽车感知周围的环境的硬件基础,如摄像头、毫米波雷达、激光雷达等传感器获取图像、距离、速度等信息,扮演眼睛、耳朵的角色,在实现自动驾驶的各个阶段都必不可少。现如今,相对于单一的传感器感知,基于多传感器的融合感知越来越走向自动驾驶的主流,数据多来源让最终的感知结果变得更加稳定可靠,更能利用到每个传感器的优势而避免缺陷。
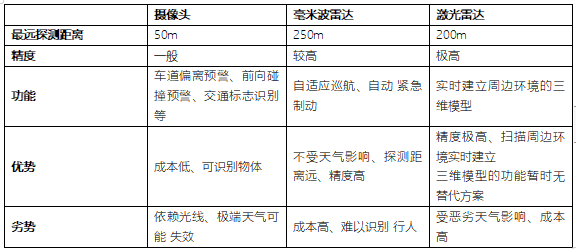
图1:各传感器之间的优劣势比较
目前市场上的自动驾驶感知技术路线主要分为视觉方案(摄像头为主导)和激光雷达方案。
在这里需要说明的是,采用激光雷达的方案并不意味着抛弃视觉算法,而是在原视觉算法方案的基础上增加了激光雷达的应用。更进一步可以说是,仅依靠视觉算法的方案,与以激光雷为核心的多传感器融合的方案之间的比较。
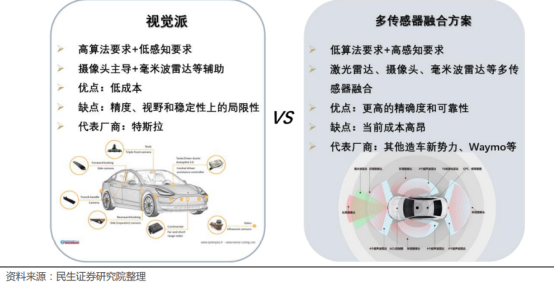
图2:两种方案的对比
视觉方案获取数据的方式与人眼感知的更为相似,图像模式识别为其核心流程,优势是技术成熟,具有成本优势,但是十分依赖芯片+算法。特斯拉入局自动驾驶最早,利用低成本视觉硬件+海量数据算法壁垒高筑,一枝独秀。
- 特斯拉的逻辑是数据积累+算法加持实现正反馈机制,为其高高筑起了在自动辅助驾驶视觉方案的壁垒。数据积累:特斯拉作为最早入局 ADAS 系统的新能源车品牌,拥有全球最多的一手数据资料,这正是神经网络算法不断优化的基础,截至 2020 年 4 月,特斯拉 Autopilot 累计里程已超 33 亿英里。庞大的数据量使特斯拉在高精度地图、障碍物识别等方面积累显著领先于竞争对手。
- 算法加持:特斯拉创新推出“影子模式”,这使得车机系统在 ADAS 功能未开启时也可以根据人类驾驶者的行为进行图像识别与路径规划,进而实现算法改进。具体来讲,系统的算法在“影子模式”下做持续模拟决策,并且把决策与驾驶员的行为进行对比,一旦两者不一致,该场景便被判定为“极端工况”,进而触发数据回传。
那么视觉算法方案的天花板在哪里?
从安全性的角度来看:视觉算法的识别准确率已经很高了,只是它对极端情况的处理能力实在有限。这是正常的情况,即便是人类依靠双眼,有时候也会因为眼睛的可视范围、眼花等问题导致交通事故的产生。在路况愈来复杂的情况下,很难满足L3以上的需求。
从算力的角度来看:随着道路交通情况的变化越来越复杂,对芯片算力的需求也越来越高。特斯拉完全自主研发的 FSD 全自动驾驶芯片,单片单芯片算力 230TOPS,已经远超市面上已经量产的其他车载芯片,就算如此,当前的算法水平远达不到人类要求的水平。但若要实现 L5 级完全自动驾驶,系统整体算力应至少达到 500TOPS,芯片研发迭代未来仍面临较大提升空间。
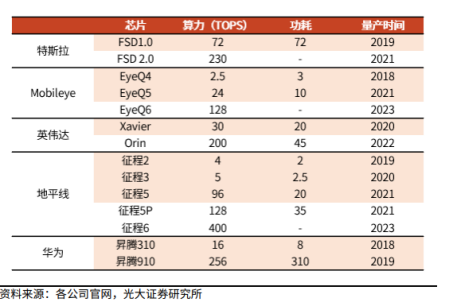
图3:主流芯片厂商参数对比
从成本角度来看:这是视觉方案最大的优势!!!第一性原理。
视觉方案与人不同的是,人眼配备了超强的智能处理器(大脑),可以在毫不费力的情况下识别出环境中的车道、车辆、行人等,对车辆来说,像素信息只是无意义的海量数字,必须经过抽象、重构等复杂过程,依赖超强智能才能达到人类的识别效果。也就是说,如果不配备激光雷达,要想通过智能算法弥补感知能力地缺陷,需要多付出几倍,甚至10倍的努力。
打个比方,咱们人类驾驶员在开车的时候,偶尔也就看花眼的时候,比如将近处的物体识别成了远处的 —— 这就是大脑在处理像素信息的时候产生了视错觉。但如果给每个像素点都标上距离信息(相当于配备了激光雷达),那就绝不可能产生这种视错觉了。同时,除了上面提到的场景之外,激光雷达对于强光变换、弯道巡航、夜间行车、狭窄通行等场景下都会很有帮助。
即便是有一天视觉算法的水平达到了人类驾驶员的水平,增加激光雷达依然可以进一步降低事故概率。
为什么激光雷达会让人更放心呢?
这要从它的原理讲起:一条激光,穿过去的时候是直的,相当于数字扫点,理论上把所有周围的点扫一遍之后,就能清楚地知道周围环境是什么样。下图是一张激光雷达形成的点云图像,这是一张包含了距离信息的“照片”。
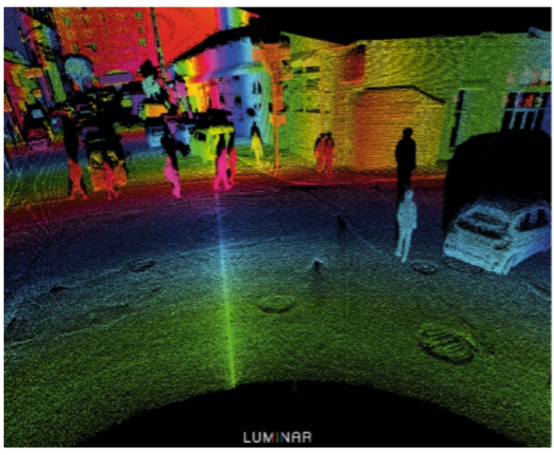
图片来源:Nature Photonics volume12,page441(2018) Credit:Luminar
目前,激光雷达来还处于“半上车”的状态,之所以发展的如此缓慢,究其原因,难在成本控制。按照公开资料显示,特斯拉目前所运用在其车型上的单目摄像头成本在150~600元之间,更复杂的三目摄像头成本也不过千元以内。根据中金公司研究部的调研,当前可量产激光雷达的平均价格约500-1000美元;根据盖世汽研调查显示,如果激光雷达要大规模装车,64%的车企接受的价格在1,000元人民币以下。

图4:目前市场各主要方案产品价格概览
从上图可以看出,2020年以来,大部分产品价格保持在500~2000美元区间。技术的进步促进了成本的降低,如下图所示:
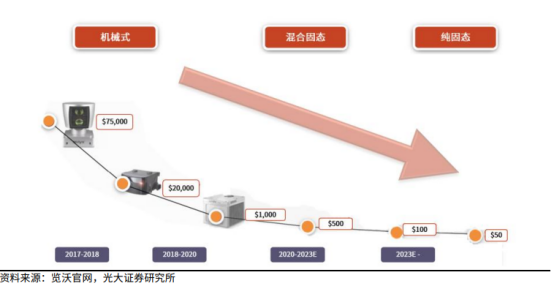
图5:车载激光雷达价格下降趋势明显
降低成本的核心关键就在于内部结构的改动,带来成本大幅下降。以下是不同技术路径带来的成本变动:
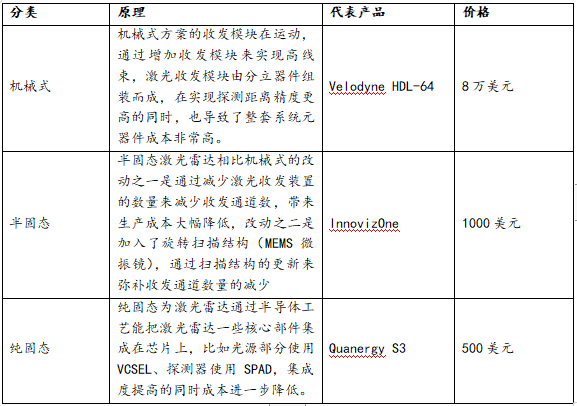
图6:不同技术路径带来的成本变动
当然,除了技术进步带来成本的降低外,还有一些其他的方式也可以带来成本的降低,例如:
- 量产导致成本的降低;
- 针对应用场景开发特定性能的产品以降低成本,这一点需要下游的需求量足够大,采用ASIC芯片,在重复成本方面具有很大的优势;
- 提供整套方案,激光雷达让出的利润可以在整套方案中挣回来,其实也相当于降低了成本。以Luminar为例,在2025年Luminar 将具备硬件+2 种解决方案的多渠道盈利模式,相关营收将超过 40%。
虽然目前的成本问题并未得到有效解决,但如今已经有先行者开始将激光雷达正式应用到上市的汽车上。
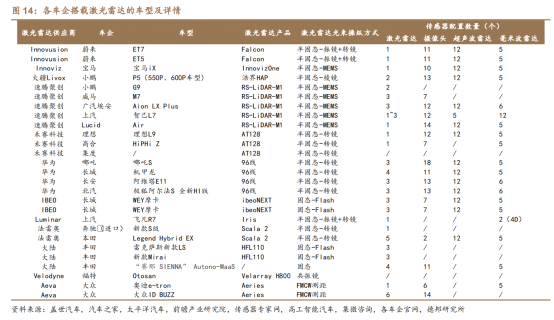
图7:各车企搭载激光雷达的车型及详情
2022年宣布上市的搭载激光雷达的车型至少有20款,多数汽车安装3颗,最多的安装了4颗。这标志着自动驾驶技术的产业化,又往前走了一步。相对于计算机视觉技术,激光雷达技术优点是安全性上会更高。这也是行业主动推动激光雷达在更高级别的自动驾驶中,成为主流的主要动力





