
全固态激光雷达(硅光芯片)
OPA全固态+FMCW测距+硅光集成,这是车用激光雷达的终极解决方案。
 融资信息仅向特定对象披露
融资信息仅向特定对象披露
蔡景伟
蔡聪
-1-
激光雷达:智能驾驶汽车的眼睛
2007年,一场名为“城市挑战”的自动驾驶汽车挑战赛备受关注,装配Velodyne64线激光雷达HDL-64的雪佛兰Tahoe无人驾驶汽车,历经4小时10分20秒最终获得比赛的冠军。来自卡内基·梅隆大学的Tartan Racing获得200万美元的冠军奖金。激光雷达和无人驾驶技术也因此进入聚光灯下,谷歌、百度、Uber等龙头企业纷纷组建无人驾驶部分,重金投入研发。随后,传统汽车大厂BBA、大众、日产、丰田等等,以及快速发展的新兴造车势力如蔚来、小鹏、华为等等都高调进入无人驾驶系统的研发领域。自动驾驶辅助系统已逐渐成为中高端车型的标配,无人驾驶技术也在从L2向L3迈进。
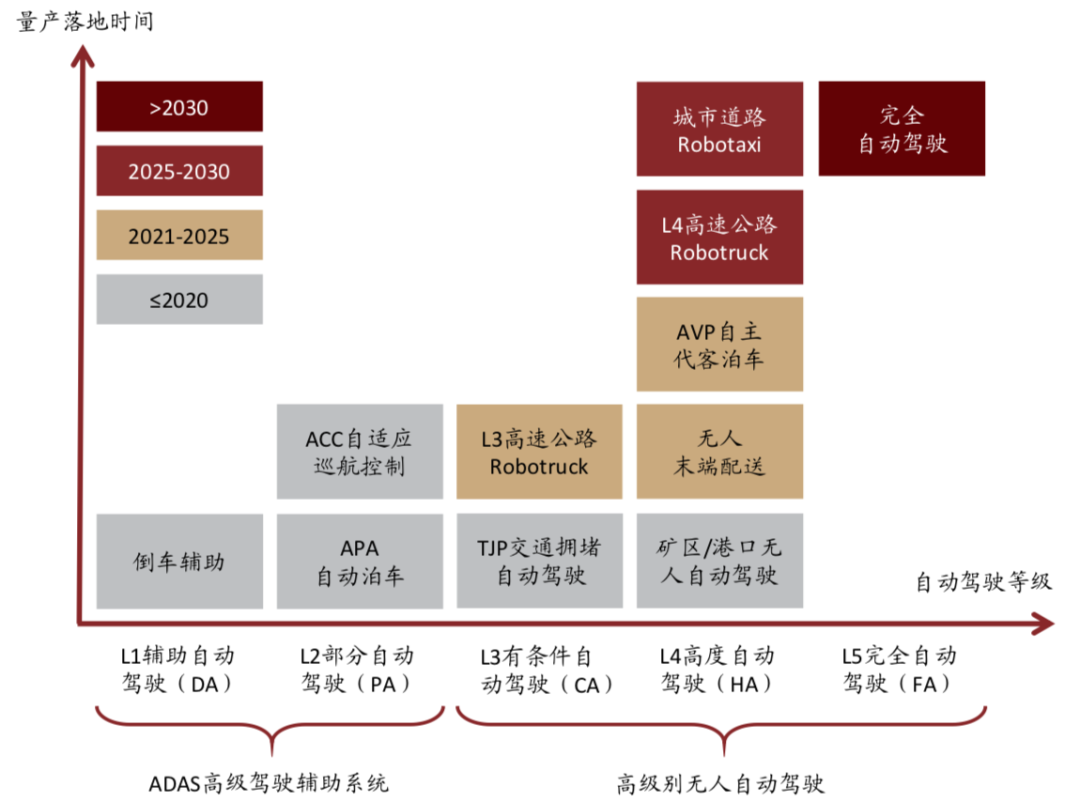
图片:从自动驾驶辅助系统到无人驾驶技术共有五级L1~L5,来源:中金
从自动驾驶辅助技术L2迈向部分场景自动化驾驶技术L3,对传感器的测距范围,测距精度,静态物体识别,以及传感实时性都提出了更高要求。虽然特斯拉坚持走摄像头视觉为主+毫米波等辅助手段的技术方案,但绝大多数玩家都已经站队激光雷达为主的方案。激光雷达已经成为L3及以上级别智能驾驶的核心传感器,被称作未来“智能驾驶汽车的眼睛”。
据国信证券汽车前瞻研究报告,全球乘用车市场激光雷达需求量将由2021年的22万颗快速提升至2025年的2,134万颗,CAGR为214%,渗透率由2021年的0.2%增至2025年的14%,市场规模将由2021年的21亿元增至2025年的541亿元,CAGR为126%。激光雷达成为一个“超大赛道”。2025年激光雷达的市场规模相当于2021年汽车中控显示屏的市场。
-2-
什么是“激光雷达”
激光雷达,简称LiDAR,是Light Detection And Ranging的缩写,中文含义是“光探测与测量”,是一种利用激光来测量物体距离的方法。
激光雷达通过扫描可以得到周围环境的3D点云数据,再与其他传感器(如毫米波和摄像头等)数据结合成精确数字高程模型,为车辆在行驶环境中提供静态和动态物体的可靠数据。可用于障碍物检测、避免碰撞和安全导航。
业界普遍认为,有了激光雷达,智能驾驶汽车更安全,导航更精确,最终实现良好的自动驾驶系统性能。下图是一张激光雷达形成的点云图像,这是一张包含了距离信息的“照片”。
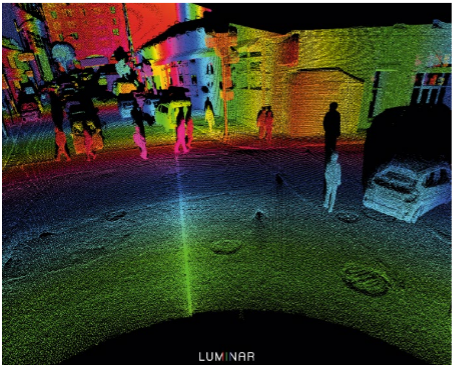
图片来源:Nature Photonics volume12,page441(2018) Credit:Luminar
视频:《激光雷达真的是自动驾驶的必需品吗?抱歉它真的是!》by 芬奇镇青年
-3-
巨大潜力的市场
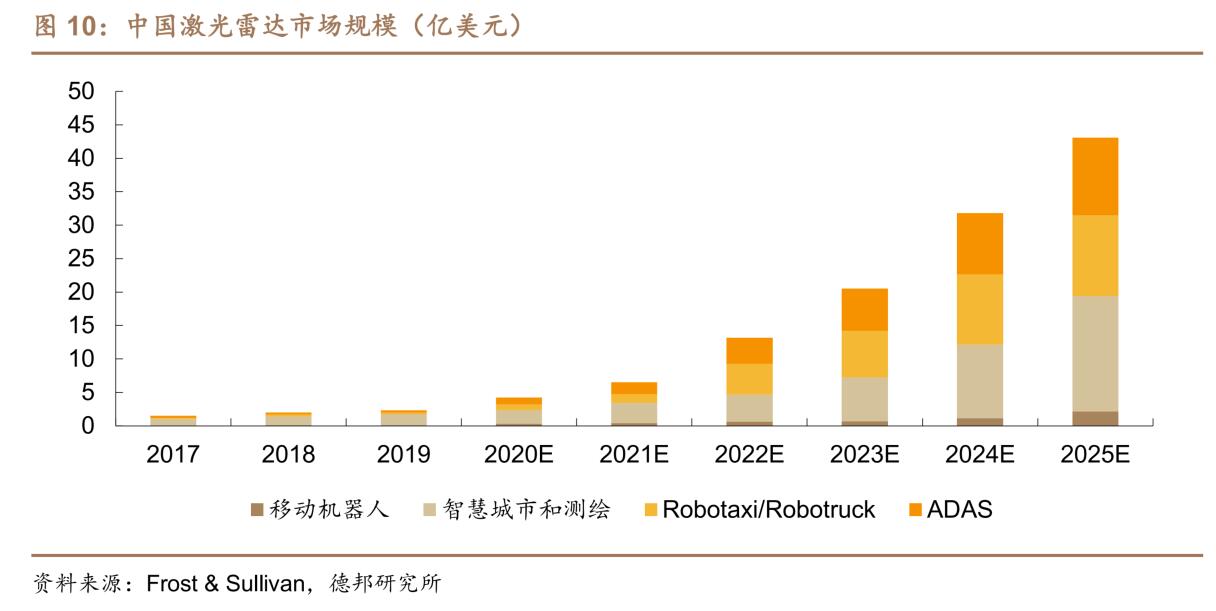
根据Frost&Sullivan,全球市场规模预计 2025 年达到 135 亿美元,其中智能驾驶市场规模约 46 亿美元。2025 年中国激光雷达市场规模将达到 43.1 亿美元,其中智能驾驶市场规模约 12 亿美元。
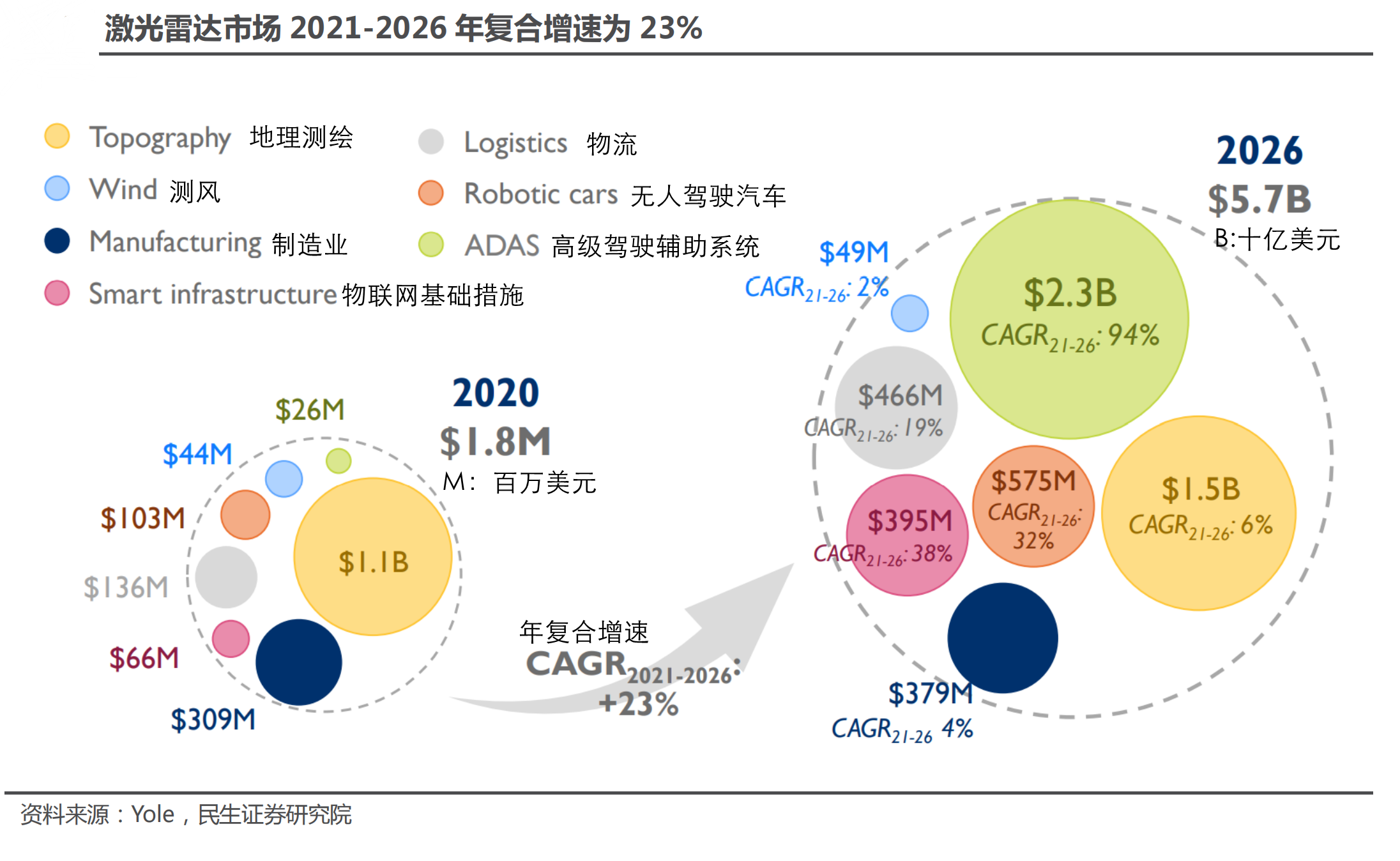
而根据 Yole 数据预测,激光雷达中国整体市场规模到 2026 年有望达到 57 亿美元,2021-2026 年行业 CAGR 为23%。其中用于 ADAS 领域的激光雷达市场空间到 2026 年有望达到 23 亿美元,5 年 CAGR 高达 94%,2021年迎来了放量元年。
-4-
激光雷达技术方案
激光雷达有四个组成部分:激光发射系统、扫描系统、激光接收系统、控制与数字信号处理系统。
- 激光发射模块:驱动器控制激光器,产生需要的激光束,发射出来。
- 扫描系统:控制激光束射出,进行扫描,产生实时的空间图形(1维或者2维)。
- 激光接收模块:用光电探测器接受目标物体反射回来的激光,并进行处理,得到接收信号。
- 控制与数字信号处理系统:控制整个激光雷达的运行以及信号的处理,最终建立目标物体模型。
根据这些系统采取的不同的技术方案,激光雷达有多种分类方法。其中,激光雷达按照测距的原理以及扫描的方式有以下分类:
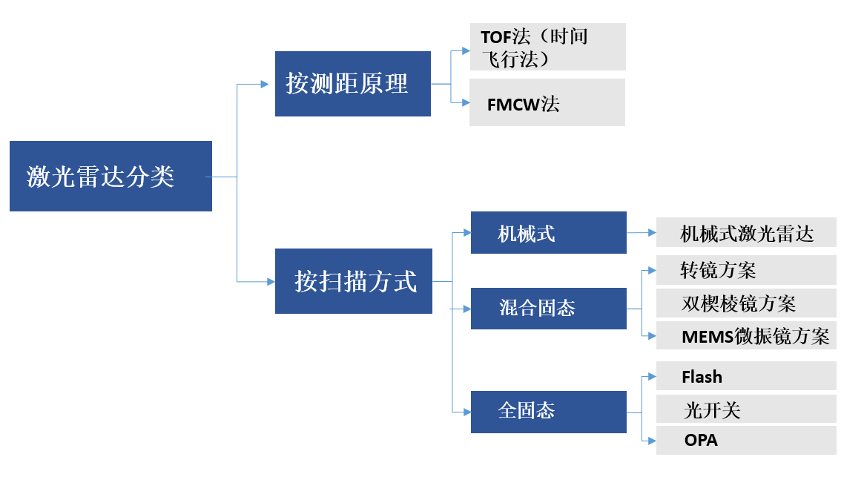
从扫描方式看,机械式正面临着淘汰,混合固态MEMS 方案是目前中期的主流选择,是过渡产品,而全固态是终极的方向。机械式激光雷达的致命缺点在于价格昂贵,光路调试、装配复杂、生产周期漫长、行车环境下可靠性不高。混合固态MEMS 方案可以大幅降低成本和体积。目前 MEMS 类半固态激光雷达是市场的最主流方案,相对于纯固态方案更容易实现,搭载车型众多,仍将成为中期的主流选择。纯固态式激光雷达具有扫描速度快、精度高、可控性好、体积小等特点,但纯固态激光雷达技术并没有完全成熟,未来有望迎来商业落地并成为激光雷达的发展趋势。
从测距原理来看,虽然ToF是现在普遍采用的方案,但FMCW(调频连续波)相较于ToF(飞行时间法)具有抗干扰性强、测量距离长、分辨率高、对道路障碍物探测更加敏感、能探测速度信息的优势,成为了激光雷达测距方案的发展方向。
-5-
激光雷达上车的障碍
激光雷达打开大规模车用的市场前要克服两个障碍:
- 成本。业界普遍认为,当单个激光雷达的成本降到1,000元以下,会被车厂广泛接受。
- 车与车之间的相互干扰。
降低成本
根据中金公司研究部的调研,当前可量产激光雷达的平均价格约500-1000美元;根据盖世汽研调查显示,如果激光雷达要大规模装车,64%的车企接受的价格在1,000元人民币以下。显然,目前市场的方案在价格上达不到大规模使用的要求。

图片:目前市场各主要方案产品价格概览 来源:各公司官网、德邦研究所
激光雷达的成本主要取决于两大模块:收发模块和扫描模块。其中,激光雷达性能主要取决于收发模块,可靠性主要取决于扫描模块,两者都很重要,占总成本的近90%。采用硅光技术和集成电路技术,把激光收发模块、模电前端芯片与扫描模块的集成到一颗芯片上,也就是把雷达“芯片化”,有望把成本降低至100美元以下。
消除干扰
从单个的激光雷达工作方式看,雷达发出激光光束,在目标物体上形成反射,雷达再接收反射回来的光,然后用各种技术手段进行信号处理,最终知道目标物体的位置和大小等信息。但是,如果A车的激光雷达接收到B车激光雷达光束被反射回来的信息,还误认为是A车自己的光束,就会出现误判,就有了安全隐患。迄今为止,只有FMCW激光雷达方案能够解决这个问题。
视频: FMCW VS ToF LiDAR by SILC (工研院翻译)
-6-
激光雷达上车的解决方案
——发射器+OPA+FMCW+ASIC单片集成
本项目为世界级硅光领域的顶尖专家的创业项目,专注激光雷达芯片化设计的Fabless厂商(即专注设计、销售,生产完全外包的厂商)。主要开发基于OPA光学相控阵+FMCW相干探测+ASIC模拟和混合集成IC,包括固态扫描OPA,平衡探测器,激光器,自动增益控制AGC,跨阻抗放大器TIA、窄线宽可调激光器及激光器驱动芯片等,属于国产率极低的全固态激光雷达芯片。
OPA:光学相控阵方案是利用相干原理采用多个光源组成阵列,控制各光源发射的时间差,从而合成角度灵活可控的主光束,向不同方向发射。用这种方式替代机械的方式,控制光束的发射方向,实现全固态。没有任何的机械结构,便于集成,体积非常小,稳定性强、成本更低。
视频:OPA固态激光雷达介绍 by Quanergy (群蜂社翻译)
FMCW:调频连续波抗干扰能力强。产品具有更强的抗干扰性,能够解决各大车厂一直担心的大批量使用激光雷达后的安全性问题。
硅光集成:可以帮助激光雷达整体实现小型化、低成本化、一致性,当前硅光集成电路平台以及产业生态的发展也为高度集成的OPA激光雷达提供了历史性的机遇。本项目研发成功有望把激光雷达成本控制在1,000元人民币以内,实行大规模的下游应用。
本项目比起现有激光雷达方案具有很强的技术领先优势,包括硅光上的实际能力、算法能力和芯片一体化集成的能力。代表着激光雷达最前沿的发展方向,是激光雷达上车的终极解决方案,也是最难的方案。

对接勇于探索的创业者和敏锐的投资者
本项目仅限于群蜂社“蜜圈会员”参与,欢迎加入我们!
登录可以查看更多信息。
点击登录





